Third Camp TUMO Advanced Educational Robotics International Workshop by BOGATECH, Yerevan, Armenia
13-07 to 25-07-15
The Third Camp TUMO Advanced Educational Robotics International Workshop is a collaborative initiative between TUMO Center for Creative Technologies and BOGATECH Educational Robotics Workshop of NOUTEC. Camp TUMO is a great technological experience that allows young people to have a multicultural adventure meeting pals from everywhere in the world to undertake a big range of workshops, like moviemaking, animation, photography, digital music, digital drawing, design of videogames, computer programming, robotics, etc., practicing English, the official Camp TUMO language.
This year given that the advanced robotics course was held in parallel with the parametric design course, led by the architect and computational designer Biayna Boghosian, we decided to join the workshops, taking advantage of the students' transversal knowledge and undertake a common project joining art and technology. The project consisted on creating an interactive public playful space we called "Sensible Playgrounds". The students devised a sort of interactive game where people interact with each other and with the space by means of sensors and colors. Users are dressed with a kind of pentagonal armor of different colors which allows the user to detect the space and to recognize the other users. The triangular geometry space, inspired on the TUMO public park, generates a hexagonal 3D mesh which deforms in function of the interaction with the users.
Arduino was used to build the sensible part of the armor with different sensors of proximity and color and web cameras for image recognition. The armor connects to the central system via WiFi and to the 3D mesh via Bluetooth. LEGO Mindstorms was used to build the 3D mesh, it was programed with LabVIEW and it is explained below with more detail.
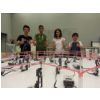
Inspired by the kinetic quadrangular structure by the artist Stephen Cartwright, an irregular and deformable hexagonal structure was designed and built using straws, where a servomotor was placed on each vertex to move it vertically. 23 motors and 8 brains or LEGO Mindstorms NXT intelligent bricks were used. The main challenge was to synchronize the movement of all the motors by using the 8 intelligent bricks, considering that each brick can only control 3 motors. The master motor sends a signal each time it turns 90 degrees, in turn, when the rest of the motors receive this signal they try to catch up with the same multiple of degrees of turn. Given that the Bluetooth connection between intelligent bricks to synchronize the motors' movements is too slow, not very reliable and complex, because the master brick can only connect to 3 slaves, we decided to experiment with light. The slave bricks use a light sensor to detect the pulse of the master motor and send a signal to their motors to turn 90 degrees. The motors use a PID (Proportional Integral Derivative) algorithm to correct their error in relation to the master motor's turn the fastest possible. The project was very successful and the most interesting is that to generate different types of movements, like a back and forth movement or a wave, you only need to phase out the motors when starting the 3D mesh movement. The Sensible Playgrounds project demonstrated that art and technology can be combined using imagination to create robotic structures and interactive spaces with a scale that goes beyond the object.
El Tercer Taller Avançat Internacional de Robòtica Educativa Camp TUMO és una iniciativa de col·laboració entre TUMO Center for Creative Technologies i el Taller de Robòtica Educativa BOGATECH de NOUTEC. El Camp TUMO és una gran experiència tecnològica que permet als joves realitzar una aventura multi-cultural coneixent joves de tot el món per realitzar un gran ventall de tallers, com ara moviemaking, animació, fotografia, música digital, dibuix digital, disseny de vídeojocs, programació, robòtica, etc., practicant l'anglès, llengua oficial del Camp TUMO.
Aquest any donat que el curs de robòtica avançada va coincidir amb el curs de disseny paramètric dirigit per la arquitecta i dissenyadora computacional Biayna Boghosian, vàrem decidir ajuntar els tallers, aprofitar els coneixements transversals dels alumnes i realitzar un projecte comú combinant art i tecnologia. El projecte va consistir en crear un espai de joc públic interactiu que vàrem anomenar "Sensible Playgrounds". Els alumnes van idear una mena de joc interactiu on les persones interactuen entre sí i amb l'espai mitjançant sensors i colors. Els usuaris porten una mena d'armadura pentagonal de diferents colors que permet a l'usuari detectar l'espai i reconèixer els altres usuaris. L'espai de geometria triangular, inspirat amb el parc públic de TUMO, genera una malla hexagonal 3D que es deforma segons la interacció amb els usuaris.
Per realitzar la part sensorial de l'armadura es va utilitzar Arduino amb diferents sensors de proximitat i de colors i càmeres web pel reconeixement d'imatges. L'armadura es connecta al sistema central via WiFi i a la malla 3D via Bluetooth. La malla 3D es va realitzar amb LEGO Mindstorms, es va programar amb LabVIEW i s'explica amb més detall a continuació.
Inspirats amb l'estructura cinètica quadrangular de l'artista Stephen Cartwright, es va dissenyar una estructura hexagonal irregular i deformable construïda amb palletes, on a cada vèrtex es va col·locar un servo-motor per desplaçar-lo verticalment. Es van utilitzar 23 motors i 8 cervells o maons intel·ligents de LEGO Mindstorms NXT. El repte fonamental va ser sincronitzar el moviment de tots els motors mitjançant els 8 maons intel·ligents, tenint en compte que cada maó només pot controlar 3 motors. El motor mestre envia un senyal cada vegada que gira 90 graus, al seu torn, quan la resta de motors reben aquest senyal intenten assolir el mateix múltiple de graus de gir. Donat que la connexió Bluetooth entre maons intel·ligents per sincronitzar els moviments dels motors resulta massa lenta, poc fiable i complexa, ja que el maó mestre només es pot connectar a 3 esclaus, es va decidir experimentar amb la llum. El maó mestre encén una llum cada vegada que el seu motor mestre gira 90 graus a velocitat constant. Els maons esclaus utilitzen un sensor de llum per detectar el pols del motor mestre i envien un senyal als seus motors per girar 90 graus. Els motors utilitzen un algoritme PID (Proporcional Integral Derivatiu) per corregir el seu error respecte del gir del motor mestre el més ràpid possible. El projecte va tenir un gran èxit i el més interessant és que per generar diferents tipus de moviments, com ara un moviment de va i ve o una onada, només cal desfasar els motors en iniciar el moviment de la malla 3D. El projecte Sensible Playgrounds va demostrar que art i tecnologia es poden combinar utilitzant la imaginació per crear estructures robòtiques i espais interactius d'una escala que va més enllà de l'objecte.
El Tercer Taller Avanzado Internacional de Robótica Educativa Camp TUMO es una iniciativa de colaboración entre TUMO Center for Creative Technologies y el Taller de Robótica Educativa BOGATECH de NOUTEC. El Camp TUMO, es una gran experiencia tecnológica que permite a los jóvenes realizar una aventura multi-cultural conociendo a jóvenes de todo el mundo para realizar un gran abanico de talleres, como por ejemplo, moviemaking, animación, fotografía, música digital, dibujo digital, diseño de vídeojuegos, programación, robótica, etc., practicando el inglés, lengua oficial del Camp TUMO.
Este año dado que el curso de robótica avanzada coincidía con el curso de diseño paramétrico dirigido por la arquitecta y diseñadora computacional Biayna Boghosian, decidimos juntar los talleres, aprovechar los conocimientos transversales de los alumnos y realizar un proyecto común combinando arte y tecnología. El proyecto consistió en crear un espacio de juego público interactivo que llamamos "Sensible Playgrounds". Los alumnos idearon una especie de juego interactivo donde las personas interactúan entre sí y con el espacio mediante sensores y colores. Los usuarios llevan una especie de armadura pentagonal de diferentes colores que permite al usuario detectar el espacio y reconocer a los otros usuarios. El espacio de geometría triangular, inspirado en el parque público de TUMO, genera una malla hexagonal 3D que se deforma según la interacción con los usuarios.
Para realizar la parte sensorial de la armadura se utilizó Arduino con diferentes sensores de proximidad y de colores y cámaras web para el reconocimiento de imágenes. La armadura se conecta al sistema central vía WiFi y a la malla 3D vía Bluetooth. La malla 3D se realizó con LEGO Mindstorms, se programó con LabVIEW y se explica con más detalle a continuación.
Inspirados por la estructura cinética cuadrangular del artista Stephen Cartwright, se diseñó una estructura hexagonal irregular y deformable construida con pajitas, donde se colocó en cada vértice un servo-motor para desplazarlo verticalmente. Se utilizaron 23 motores y 8 cerebros o ladrillos inteligentes de LEGO Mindstorms NXT. El reto fundamental fue sincronizar el movimiento de todos los motores mediante los 8 ladrillos inteligentes, teniendo en cuenta que cada ladrillo sólo puede controlar 3 motores. El motor maestro envía una señal cada vez que gira 90 grados, a su vez, cuando el resto de motores reciben esta señal intentan alcanzar el mismo múltiple de grados de giro. Dado que la conexión Bluetooth entre ladrillos inteligentes para sincronizar los movimientos de los motores resulta demasiado lenta, poco fiable y compleja, ya que el ladrillo maestro solo se puede conectar a 3 esclavos, se decidió experimentar con la luz. El ladrillo maestro enciende una luz cada vez que su motor maestro gira 90 grados a velocidad constante. Los ladrillos esclavos utilizan un sensor de luz para detectar el pulso del motor maestro y envían una señal a sus motores para girar 90 grados. Los motores utilizan un algoritmo PID (Proporcional Integral Derivativo) para corregir su error respecto al giro del motor maestro lo más rápido posible. El proyecto tuvo un gran éxito y lo más interesante es que para generar diferentes tipos de movimientos, como por ejemplo un movimiento de va y viene o una ola, solo hace falta desfasar los motores al inicio del movimiento de la malla 3d. El proyecto Sensible Playgrounds demostró que arte y tecnología se pueden combinar utilizando la imaginación para crear estructuras robóticas y espacios interactivos de una escala que va más allá del objeto.




This year given that the advanced robotics course was held in parallel with the parametric design course, led by the architect and computational designer Biayna Boghosian, we decided to join the workshops, taking advantage of the students' transversal knowledge and undertake a common project joining art and technology. The project consisted on creating an interactive public playful space we called "Sensible Playgrounds". The students devised a sort of interactive game where people interact with each other and with the space by means of sensors and colors. Users are dressed with a kind of pentagonal armor of different colors which allows the user to detect the space and to recognize the other users. The triangular geometry space, inspired on the TUMO public park, generates a hexagonal 3D mesh which deforms in function of the interaction with the users.
Arduino was used to build the sensible part of the armor with different sensors of proximity and color and web cameras for image recognition. The armor connects to the central system via WiFi and to the 3D mesh via Bluetooth. LEGO Mindstorms was used to build the 3D mesh, it was programed with LabVIEW and it is explained below with more detail.
Inspired by the kinetic quadrangular structure by the artist Stephen Cartwright, an irregular and deformable hexagonal structure was designed and built using straws, where a servomotor was placed on each vertex to move it vertically. 23 motors and 8 brains or LEGO Mindstorms NXT intelligent bricks were used. The main challenge was to synchronize the movement of all the motors by using the 8 intelligent bricks, considering that each brick can only control 3 motors. The master motor sends a signal each time it turns 90 degrees, in turn, when the rest of the motors receive this signal they try to catch up with the same multiple of degrees of turn. Given that the Bluetooth connection between intelligent bricks to synchronize the motors' movements is too slow, not very reliable and complex, because the master brick can only connect to 3 slaves, we decided to experiment with light. The slave bricks use a light sensor to detect the pulse of the master motor and send a signal to their motors to turn 90 degrees. The motors use a PID (Proportional Integral Derivative) algorithm to correct their error in relation to the master motor's turn the fastest possible. The project was very successful and the most interesting is that to generate different types of movements, like a back and forth movement or a wave, you only need to phase out the motors when starting the 3D mesh movement. The Sensible Playgrounds project demonstrated that art and technology can be combined using imagination to create robotic structures and interactive spaces with a scale that goes beyond the object.
El Tercer Taller Avançat Internacional de Robòtica Educativa Camp TUMO és una iniciativa de col·laboració entre TUMO Center for Creative Technologies i el Taller de Robòtica Educativa BOGATECH de NOUTEC. El Camp TUMO és una gran experiència tecnològica que permet als joves realitzar una aventura multi-cultural coneixent joves de tot el món per realitzar un gran ventall de tallers, com ara moviemaking, animació, fotografia, música digital, dibuix digital, disseny de vídeojocs, programació, robòtica, etc., practicant l'anglès, llengua oficial del Camp TUMO.
Aquest any donat que el curs de robòtica avançada va coincidir amb el curs de disseny paramètric dirigit per la arquitecta i dissenyadora computacional Biayna Boghosian, vàrem decidir ajuntar els tallers, aprofitar els coneixements transversals dels alumnes i realitzar un projecte comú combinant art i tecnologia. El projecte va consistir en crear un espai de joc públic interactiu que vàrem anomenar "Sensible Playgrounds". Els alumnes van idear una mena de joc interactiu on les persones interactuen entre sí i amb l'espai mitjançant sensors i colors. Els usuaris porten una mena d'armadura pentagonal de diferents colors que permet a l'usuari detectar l'espai i reconèixer els altres usuaris. L'espai de geometria triangular, inspirat amb el parc públic de TUMO, genera una malla hexagonal 3D que es deforma segons la interacció amb els usuaris.
Per realitzar la part sensorial de l'armadura es va utilitzar Arduino amb diferents sensors de proximitat i de colors i càmeres web pel reconeixement d'imatges. L'armadura es connecta al sistema central via WiFi i a la malla 3D via Bluetooth. La malla 3D es va realitzar amb LEGO Mindstorms, es va programar amb LabVIEW i s'explica amb més detall a continuació.
Inspirats amb l'estructura cinètica quadrangular de l'artista Stephen Cartwright, es va dissenyar una estructura hexagonal irregular i deformable construïda amb palletes, on a cada vèrtex es va col·locar un servo-motor per desplaçar-lo verticalment. Es van utilitzar 23 motors i 8 cervells o maons intel·ligents de LEGO Mindstorms NXT. El repte fonamental va ser sincronitzar el moviment de tots els motors mitjançant els 8 maons intel·ligents, tenint en compte que cada maó només pot controlar 3 motors. El motor mestre envia un senyal cada vegada que gira 90 graus, al seu torn, quan la resta de motors reben aquest senyal intenten assolir el mateix múltiple de graus de gir. Donat que la connexió Bluetooth entre maons intel·ligents per sincronitzar els moviments dels motors resulta massa lenta, poc fiable i complexa, ja que el maó mestre només es pot connectar a 3 esclaus, es va decidir experimentar amb la llum. El maó mestre encén una llum cada vegada que el seu motor mestre gira 90 graus a velocitat constant. Els maons esclaus utilitzen un sensor de llum per detectar el pols del motor mestre i envien un senyal als seus motors per girar 90 graus. Els motors utilitzen un algoritme PID (Proporcional Integral Derivatiu) per corregir el seu error respecte del gir del motor mestre el més ràpid possible. El projecte va tenir un gran èxit i el més interessant és que per generar diferents tipus de moviments, com ara un moviment de va i ve o una onada, només cal desfasar els motors en iniciar el moviment de la malla 3D. El projecte Sensible Playgrounds va demostrar que art i tecnologia es poden combinar utilitzant la imaginació per crear estructures robòtiques i espais interactius d'una escala que va més enllà de l'objecte.
El Tercer Taller Avanzado Internacional de Robótica Educativa Camp TUMO es una iniciativa de colaboración entre TUMO Center for Creative Technologies y el Taller de Robótica Educativa BOGATECH de NOUTEC. El Camp TUMO, es una gran experiencia tecnológica que permite a los jóvenes realizar una aventura multi-cultural conociendo a jóvenes de todo el mundo para realizar un gran abanico de talleres, como por ejemplo, moviemaking, animación, fotografía, música digital, dibujo digital, diseño de vídeojuegos, programación, robótica, etc., practicando el inglés, lengua oficial del Camp TUMO.
Este año dado que el curso de robótica avanzada coincidía con el curso de diseño paramétrico dirigido por la arquitecta y diseñadora computacional Biayna Boghosian, decidimos juntar los talleres, aprovechar los conocimientos transversales de los alumnos y realizar un proyecto común combinando arte y tecnología. El proyecto consistió en crear un espacio de juego público interactivo que llamamos "Sensible Playgrounds". Los alumnos idearon una especie de juego interactivo donde las personas interactúan entre sí y con el espacio mediante sensores y colores. Los usuarios llevan una especie de armadura pentagonal de diferentes colores que permite al usuario detectar el espacio y reconocer a los otros usuarios. El espacio de geometría triangular, inspirado en el parque público de TUMO, genera una malla hexagonal 3D que se deforma según la interacción con los usuarios.
Para realizar la parte sensorial de la armadura se utilizó Arduino con diferentes sensores de proximidad y de colores y cámaras web para el reconocimiento de imágenes. La armadura se conecta al sistema central vía WiFi y a la malla 3D vía Bluetooth. La malla 3D se realizó con LEGO Mindstorms, se programó con LabVIEW y se explica con más detalle a continuación.
Inspirados por la estructura cinética cuadrangular del artista Stephen Cartwright, se diseñó una estructura hexagonal irregular y deformable construida con pajitas, donde se colocó en cada vértice un servo-motor para desplazarlo verticalmente. Se utilizaron 23 motores y 8 cerebros o ladrillos inteligentes de LEGO Mindstorms NXT. El reto fundamental fue sincronizar el movimiento de todos los motores mediante los 8 ladrillos inteligentes, teniendo en cuenta que cada ladrillo sólo puede controlar 3 motores. El motor maestro envía una señal cada vez que gira 90 grados, a su vez, cuando el resto de motores reciben esta señal intentan alcanzar el mismo múltiple de grados de giro. Dado que la conexión Bluetooth entre ladrillos inteligentes para sincronizar los movimientos de los motores resulta demasiado lenta, poco fiable y compleja, ya que el ladrillo maestro solo se puede conectar a 3 esclavos, se decidió experimentar con la luz. El ladrillo maestro enciende una luz cada vez que su motor maestro gira 90 grados a velocidad constante. Los ladrillos esclavos utilizan un sensor de luz para detectar el pulso del motor maestro y envían una señal a sus motores para girar 90 grados. Los motores utilizan un algoritmo PID (Proporcional Integral Derivativo) para corregir su error respecto al giro del motor maestro lo más rápido posible. El proyecto tuvo un gran éxito y lo más interesante es que para generar diferentes tipos de movimientos, como por ejemplo un movimiento de va y viene o una ola, solo hace falta desfasar los motores al inicio del movimiento de la malla 3d. El proyecto Sensible Playgrounds demostró que arte y tecnología se pueden combinar utilizando la imaginación para crear estructuras robóticas y espacios interactivos de una escala que va más allá del objeto.